当社ホームページをリニューアル致しました。
ブログも開設しましたので見てください。
ニュース一覧
2020上田地域産業展オンライン出展
箱詰機 Ver1.2
チョコ均し機
サーボカッター
製品サイト 新設
箱詰機 Ver.2.1
さらに進化したZ25ANをリリース


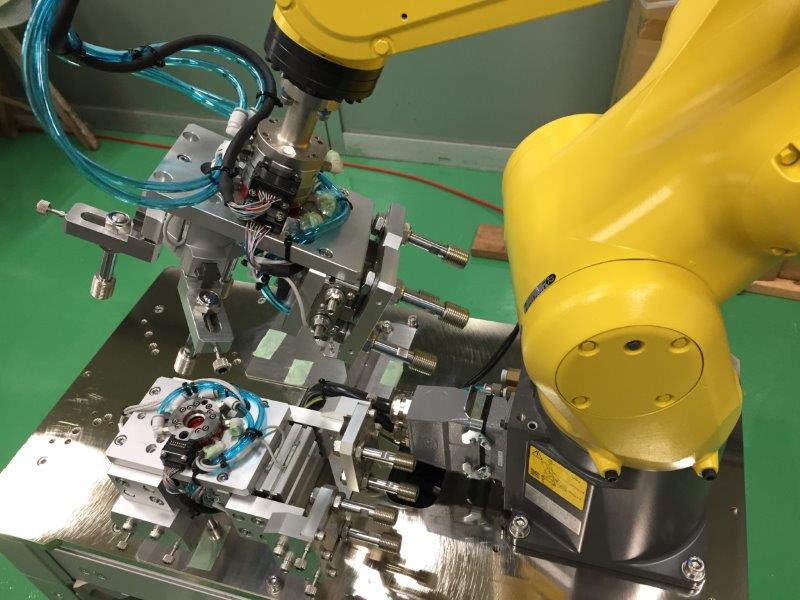
ハンドロボ
異種類のワーク対応のグリップチェンジャーを持ち、加工機へワークセット/リセットをします。
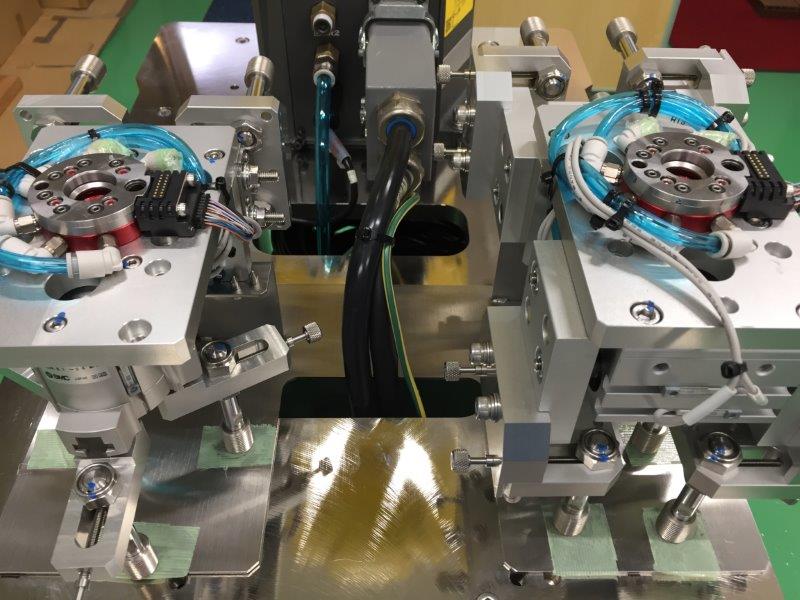
オートローダー
加工物をエレベーションストッカーから自動供給。機種選択スイッチにより数種類のワーク寸法に対応する自動調整機能が有ります。

